Quadruped Robot Dog Intelligent Walking Companion
Quadruped Robot Dog Intelligent Walking Companion
Couldn't load pickup availability
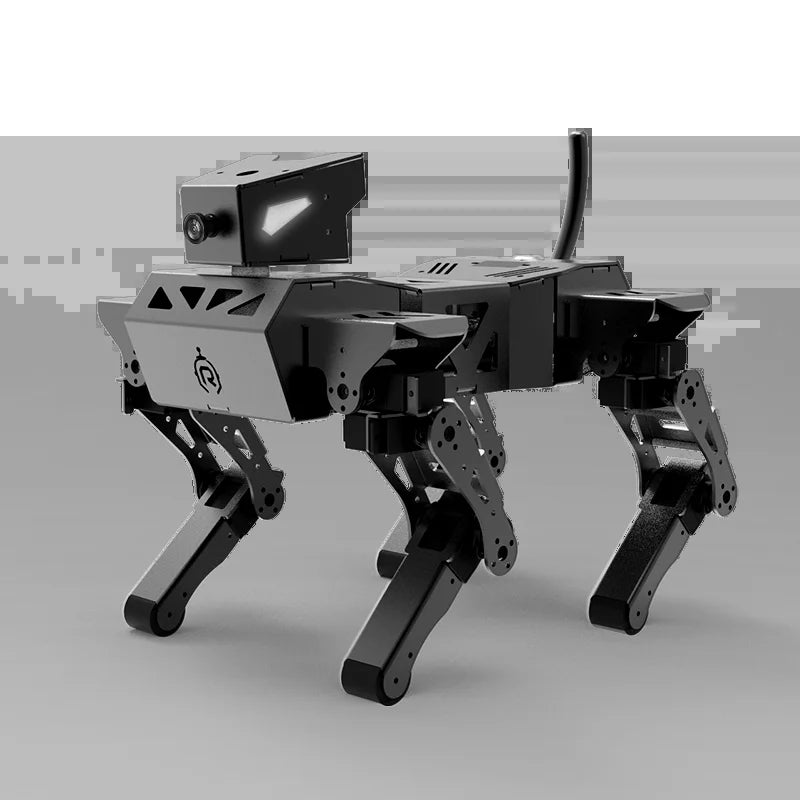
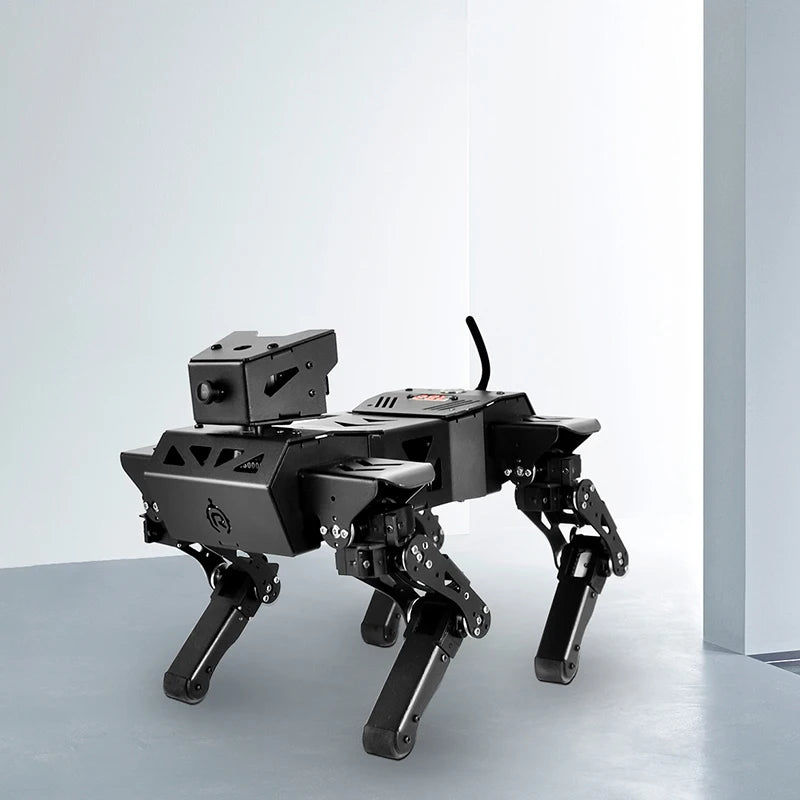
quadruped robot dog is an all-terrain learning platform that feels surprisingly alive—steady on stairs, sure-footed on gravel, and agile across office floors or classroom mats. Four independently actuated legs deliver stable gaits (crawl, trot, bound) with a low center of gravity for confident footing. A sealed chassis shrugs off dust and light rain, hot-swap batteries keep missions moving, and a top rail with power/data makes mounting payloads—camera, LiDAR, gripper—plug-and-play.
Perception and control run on board. Depth cameras and an IMU feed state estimates for balance; optional LiDAR maps cluttered rooms; ultrasonic pings help with close-range docking. Edge compute handles SLAM, obstacle avoidance, and model-predictive control in real time, so it reacts in milliseconds without cloud lag. Choose joystick teleop for demos, waypoint navigation for patrols, or scripted behaviors for repeat tasks.
Developers get a friendly stack: Python/C++ SDKs, ROS integration, log streaming, and a simulator for safe testing. Safety is baked in with e-stop, fall-recovery, torque limits, and soft software boundaries. Maintenance stays simple—check fasteners monthly, keep joints clean, and recalibrate sensors after transport.
Use it for site inspection, search training, autonomous navigation research, or STEM outreach. With agile locomotion, robust sensing, and a developer-first toolchain, a quadruped robot dog turns real spaces into testbeds—and ideas into working demos—fast.
Share